Dc motor:
L293D:
Raspberry Pi:
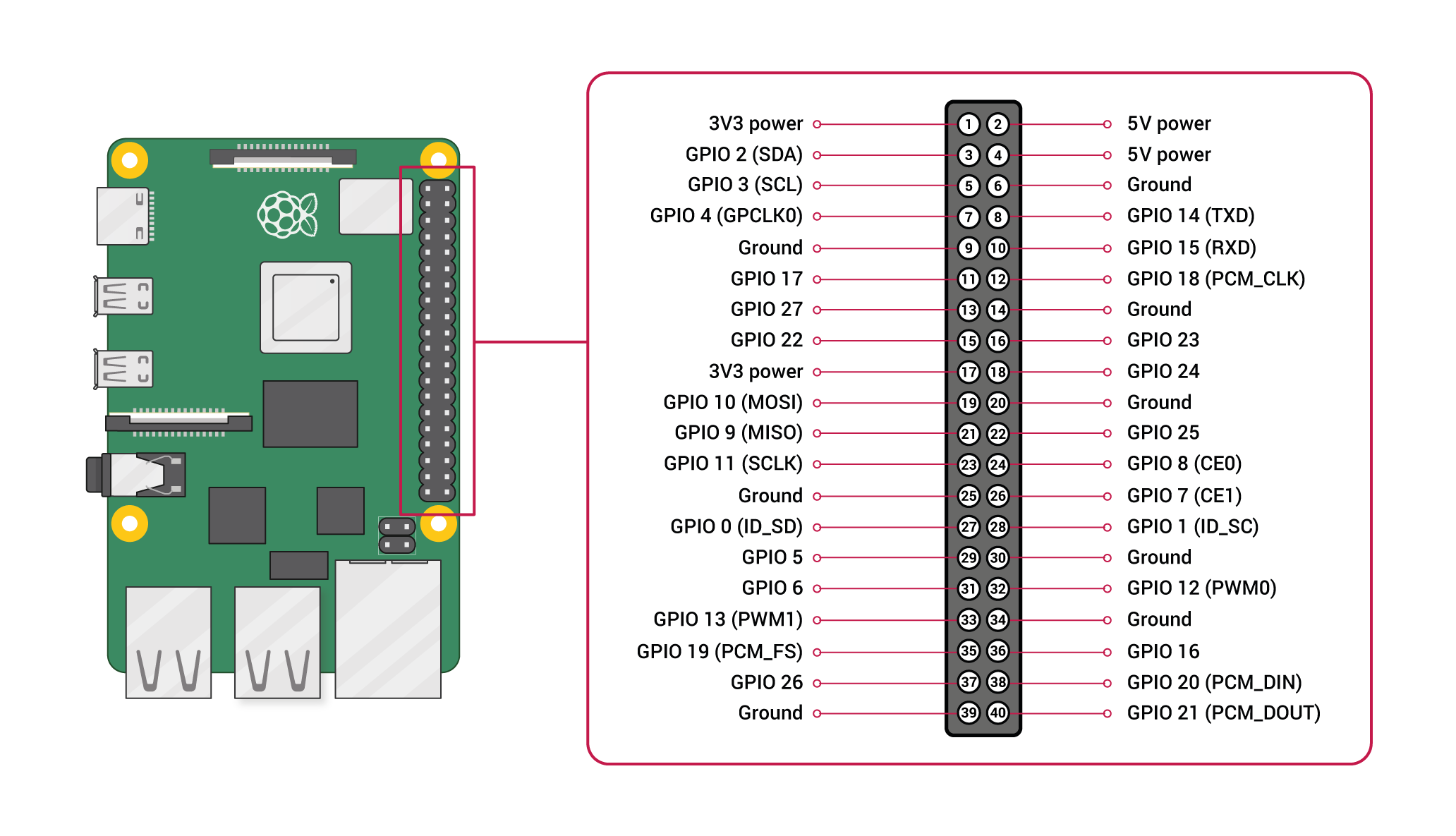
Pin configuration:
1. Vin: Two 5v pins and two 3v3 pins used for providing power supply, where processor works on 3.3v.
DC Motor Pin Configuration with Raspberry pi:

import RPi.GPIO as GPIO import time GPIO.setmode(GPIO.BOARD) IN1=16 IN2=18 GPIO.setup(IN1, GPIO.OUT) GPIO.setup(IN2, GPIO.OUT) print (“FORWARD MOTION”) GPIO.OUTPUT(IN1, GPIO.HIGH) GPIO.OUTPUT(IN2, GPIO.LOW) time.sleep(3) print (“BACKWARD MOTION”) GPIO.OUTPUT(IN1, GPIO.LOW) GPIO.OUTPUT(IN2, GPIO.HIGH) time.sleep(3) print (“Motor Stop”) GPIO.OUTPUT(IN1, GPIO.LOW) GPIO.OUTPUT(IN2, GPIO.LOW) GPIO.cleanup()